
Lucky Unlucky
[스터디] 조향장치 개요 본문
[목차]
조향장치
- 조향장치의 구성 및 원리
조작기구 / 기어장치 / 링크기구
- 수동식 조향과 동력식 조향
수동식 조향(랙엔피니언 방식, 볼 너트 방식) / 동력식 조향(유압식, 전기유압식, 전동식)
- Steering Dynamics
저속에서의 회전운동(Ackermann-Jantoud식)
- 언더스티어와 오버스티어
언더스티어 / 오버스티어
조향장치(Steering System)
조향장치란 운전자가 차의 진행방향을 의도하는대로 진행하도록 조종하는 장치이다.
조향장치는 크게 수동식 조향장치와 동력식 조향장치 두 가지 방식이 있으며 각각의 기본 작동원리는 비슷하다
조향장치의 구성 및 원리
조향장치는 크게 조작기구/기어장치/링크기구로 구성이 되어있다
1. 조작기구
운전자가 직접 조향 조작을 하여 조작력을 조향 기어 및 링크 등에 전달하는 부분
구성 예시) 스티어링 휠, 스티어링 샤프트, 칼럼 등
2. 기어장치
조향축의 회전을 감속하여 조작력을 크게 함과 동시에 조작기구의 운동방향을 바꾸어 링크기구에 전달하는 부분
예시) 볼 너트 타입, 렉&피니언 타입, 가변비 타입
3. 링크기구
기어 기구를 작동시켜 조향 바퀴를 움직이며 좌우바퀴의 위치를 지지하는 부분
예시) 피트만 암, 드래그 링크, 너클 암, 타이로드
다시 정리하면 아래와 같은 순서로 조향이 이루어진다.
① 운전자가 스티어링 휠을 돌리면 회전력은 스티어링 컬럼을 통해 스티어링 기어로 전달된다.
② 기어 박스 속에서 회전 움직임이 좌우직선 방향 움직임으로 변경되고 조향력의 방향을 변경하는 기구에 작용한다.
③ 좌우 타이로드가 위 움직임을 바퀴 너틀에 전달하여 타이어의 방향이 바뀌게 된다.
따라서 조향 부품은 금속의 봉으로 연결되어 있으며, 조향성을 얻기 위해서는 각각의 부품들의 강성이 높아야하며 부품들을 연결하는 조인트가 견고해야한다


수동식 조향과 동력식 조향
조향력에 유압 혹은 모터와 같은 장치로 조향력을 보조하면 동력식 조향이며, 그 외 보조되는 동력이 없고 기어와 감속비를 통한 회전력 증대하는 방식이면 수동식 조향이다
1. 수동식 조향(렉 엔 피니언 방식, 볼 너트 방식)
1) 렉엔피니언 방식
스티어링 칼럼 끝단에 피니언 기어는 렉과 맞물리며 회전하여 렉을 좌우로 이동시킨다. 렉 양끝에 설치된 타이로드 앤드에 의해 타이어의 방향이 변화한다.
a. 특징
- 간단한 구조에 비용도 저렴하여 승용차에 주로 사용된다
- 스티어링 휠과 타이어가 다이렉트로 연결되어 정교한 느낌을 받을 수 있으나, 타이어가 충격을 받으면 스티어링에 충격이 가해질 수 있다. (킥백 현상 발생)


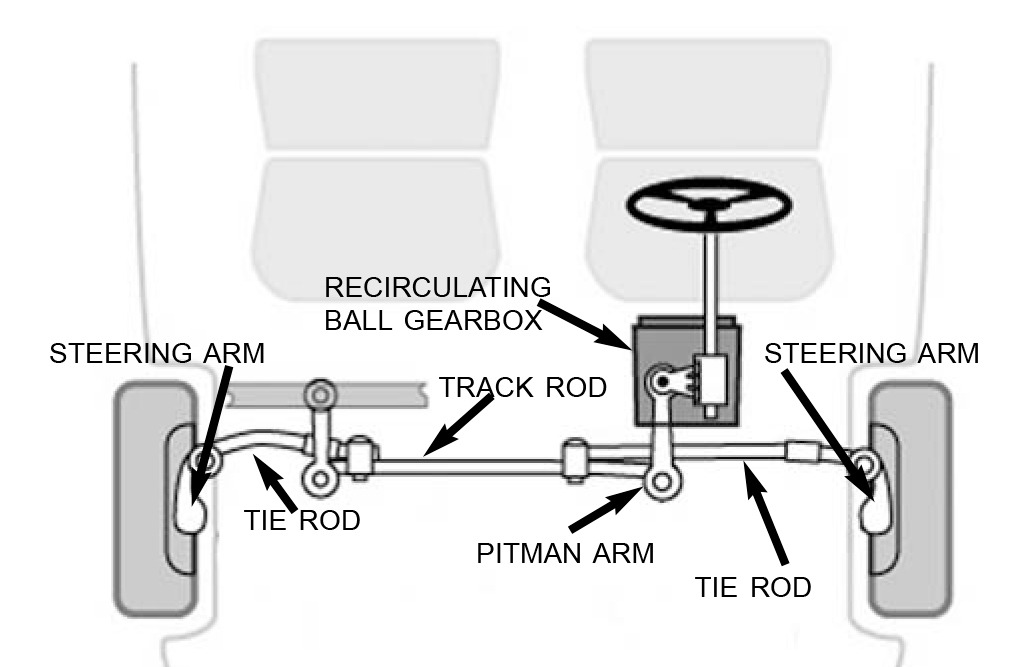
2) 볼너트 방식
볼 너트를 순환하는 강철 볼은 스티어링 샤프트의 Thread와 연결되며, 스티어링 샤프트의 회전이 전달되면 볼너트가 스티어링 샤프트 상하로 움직이며 볼너트부터 시작된 링크들의 움직임으로 타이로드를 움직여 타이어를 회전시킨다.
a. 특징
- Recirculating Ball 방식이라고도 부른다
- 랙 앤 피니언 타입과 같은 다이랙트 감은 없지만 노면에서 킥백이 작아 질높은 조향감을 얻을 수 있다.

2. 동력식 조향(유압식, 전기유압식, 전동식)
운전자가 스티어링 휠로 조향을 하며 유압 혹은 모터를 통하여 조향력을 보조하는 방식
1) 유압식 파워 스티어링(Hydraulic Power Steering System)
운전자의 스티어링 휠 조작시 엔진으로 유압 펌프를 작동시켜 유체를 가압하며, 스티어링 휠에 가해지는 조향조작력은 컨트롤 밸브로 하여 유체의 통로를 개폐하여 유압을 바퀴쪽로 전달하여 조향력을 보조한다.
a. 구조
- 유압펌프, 유압 파이프, 파워실린더, 제어밸브(로터리 밸브), 오일 리저버 등으로 구성되어 있다.
b. 작동 원리
① 유압펌프와 엔진의 크랭크샤프트 풀리가 벨트로 연결이 되어 있으며 유압펌프에 동력을 전달한다.
② 조향 시 오일은 유압 파이프와 로터리 밸브를 지나 렉기어 축에 있는 실린더에 전달된다.
③ 조향 방향에 따라 좌우 실린더의 유압 차이가 발생하며, 이 차이로 인하여 조향력을 보조한다.
④ 로터리 밸브에서 실린더로 유입되지 않은 오일은 리저버에 전달되며 순환한다.
* 차량 직진 주행 시, 좌우 실린더에 동일한 압력이 전달된다.
c. 특징
- 운전자가 적은 힘으로 핸들을 쉽게 조작할 수 있다
- 유압 펌프가 엔진과 연동되어 밸트 구동을 하며 소음 진동 및 연비 저하가 발생한다
- 엔진룸의 공간을 차지하며 무게가 무겁다
- 펌프가 엔진에 의해 구동되므로 엔진에 부하가 걸리고 에너지 소모가 발생하며, 엔진의 파워와 연비가 손실된다.



https://youtu.be/w5r_pb3m4SU?si=iEM66-UhMwNY9MX0
2) 전기유압식 파워 스티어링(Electro Hydraulic Power Steering)
유압식 파워 스티어링과 비슷한 방법으로 구동되지만, 엔진에서 동력을 얻는 유압펌프가 아닌 엔진에서 분리된 전기식 유압펌프를 적용하여 동력 조향이 필요할 때만 전기유압펌프를 사용된다
a. 특징
- 엔진에서 분리된 전기식 유압펌프를 적용한다.
- 조향 조건 및 차량 조건을 감지하고 조향시에만 작용하며 차속별 조향감 제어를 실행한다.
- 주차 시에는 가벼운 조향성, 중고속 주행 시에는 무거운 조향성을 확보 가능하다
- 엔진의 동력에 영향이 없어 차량의 연비향상과 소음 진동이 감소된다.


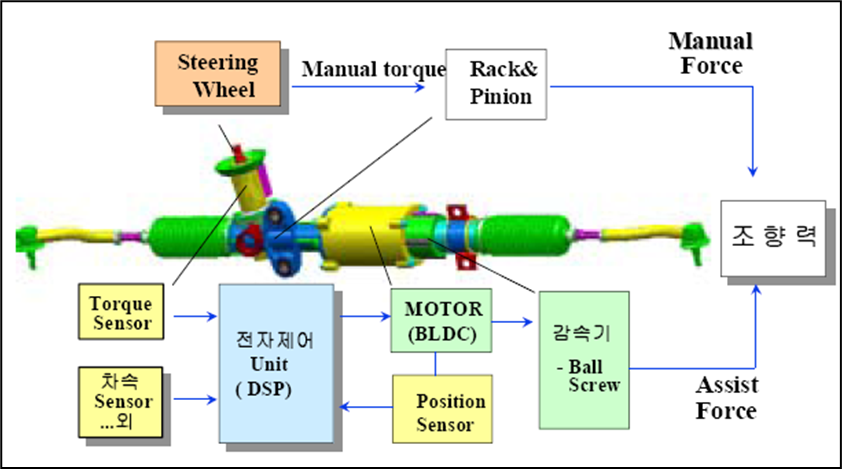
3. 동력식 조향 전동식(Electronic Power Steering, Motor Driven Power Steering)
유압식 파워 스티어링애서 오일펌프, 저장 탱크 및 각종 호스를 없애고 ECU와 모터, 토크센서로 제어하는 방식. 배터리의 전기에너지로 전동 모터를 돌려 장치의 동력을 보조해주는 장치
a. 특징
- 유압식 조향 장치에 비해 에너지 소비량이 적고, 엔진이 정지한 후에도 조향 배력 작용이 가능
- 연비 상승 효과
- 조향 조건 및 차량 조건을 감지하고 조향시에만 작용하며 차속별 조향감 제어를 실행한다.
b. EPS 종류
- 모터의 설치 위치에 따라 컬럼형(C-EPS) or 피니언기어형(P-EPS) or 랙형 전동식 조향장치(R-EPS)가 있다
| 칼럼형(C-EPS) | 피니언기어형(P-EPS) | 렉기어형(R-EPS) |
| - 스티어링 컬럼에 모터가 부착 - 컴팩트한 사이즈로 공간 확보가 용이 - 주로 소형 또는 중소형 차량에 적용 - 조향 시 반응 속도가 느림 |
- 피니언부에 모터가 부착 - 패키징의 유연성이 있다 - 주로 중형차량에 적용 |
- 랙기어부에 모터가 부착 - 가장 큰 힘을 보조할 수 있다 |


Steering Dynamics
1. 저속에서의 회전운동(Ackermann-Jantoud 식)
자동차의 조향 시스템에서 조향각을 최적화하여 바퀴가 원활하게 회전하는 원리를 기술한 기하학적 모델이며, 현대 대부분의 자동차는 이 방식을 채택하여 조향 시스템을 구성한다
Ackermann-Jantoud 식을 위해서는 차량 선회 시 양쪽바퀴가 횡방향으로 슬립되거나 스티어링 휠을 회전 시 큰 저항이 있으면 안되며, 모든 바퀴가 동심원을 그리며 선회해야 한다.

| $\delta_{o}$ : 외륜조향각 | L : 축간거리 (Wheel base) | R : 무게중심의 회전 반경 |
| $\delta_{i}$ : 내륜조향각 | w : 킹핀 간 거리(track) |
언더스티어와 오버스티어
1. 언더스티어
차량의 선회 시, 운전자가 의도한만큼 조향이 이루어지지 않아 바깥쪽으로 밀려나가는 현상. 앞바퀴의 접지력이 부족하여 앞바퀴가 미끄러지면서 차량의 선회가 원활하지 않아 바깥쪽으로 향하게 된다.
언더스티어 발생 상황
- 전륜 구동 차량에서 흔히 발생
- 빠른 속도로 선회 시
- 타이어의 접지력이 낮을 시
- 차량의 무게가 앞으로 치우쳐 있을 때
2. 오버스티어
차량의 선회 시, 운전자가 의도한 것보다 더 조향이 이루어져 안쪽으로 돌아가는 현상. 뒷바퀴의 접지력이 부족하여 뒷바퀴가 미끄러지면서 차량의 커브의 안쪽으로 향하게 된다.
오버스티어 발생 상황
- 후륜 구동 차량에서 흔히 발생
- 너무 빠른 속도로 코너를 돌 때
- 타이어의 접지력이 낮을 시
- 차량의 무게가 뒤로 치우쳐 있을 때

'공부거리 > 자동차 공부' 카테고리의 다른 글
| [스터디] 연료전지차 개요 (0) | 2024.07.24 |
|---|---|
| [스터디] 제동장치 개요 (0) | 2024.07.22 |
| [스터디] 엔진 개요 (1) (0) | 2024.07.22 |
| [스터디] 냉각장치 개요 (0) | 2024.07.20 |
| [스터디] 현가장치 개요 (0) | 2024.07.13 |



